Technology
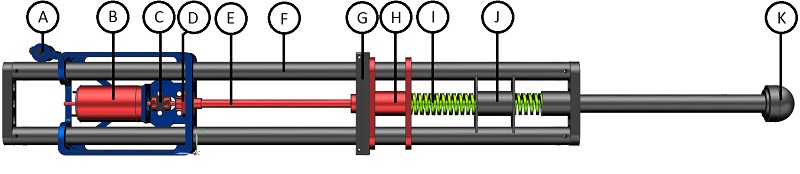
The Pegasus robot has a prismatic leg design with two degrees of freedom (Pic. 1). A spring (Pic. 1.I) can be used to store impact energy upon touchdown and release it again at take off. The resulting motion is a pogo-stick like hopping with high efficiency due to the spring that stores the energy which is therefore not lost at ground collisions. The actuation in the telescopic direction is implemented with a motor (maxon motor) attached to a spindle drive (Pic. 1.E) that acts in series with the spring. It slides bars (Pic. 1.F) through sliding bearings to lengthen or shorten the leg. During the stance phase the leg is slightly extended to precompress the spring and thus put energy into the system to cover for friction and impact losses.
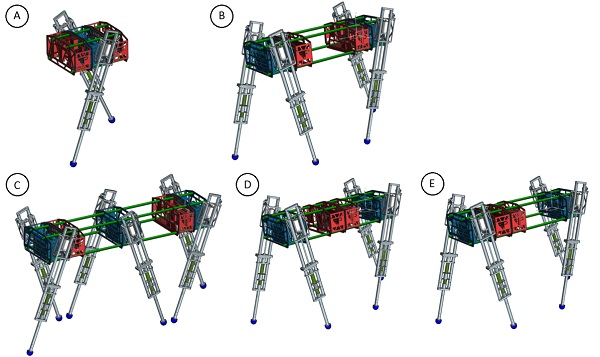
The main body consists of several modules. The leg modules (Fig. 2, blue) and electronics modules (Fig. 2, red) can be assembled as desired (Fig. 2.A-E). A leg is attached to each side of the leg module which also includes the hip actuation and motor controllers. One electronics module contains an Inertial Measurement Unit (IMU), an Atom TM based Linux PC and a National Instruments Single-Board RIO. All power electronics are placed in the second electronics module. To obtain the chosen configuration the modules with spacers between them are slid on four tubes (Fig. 2, green). The configuration this project is using is shown in Fig. 2.B. Further research projects can use the robot in different configuration.